Robotic Arm
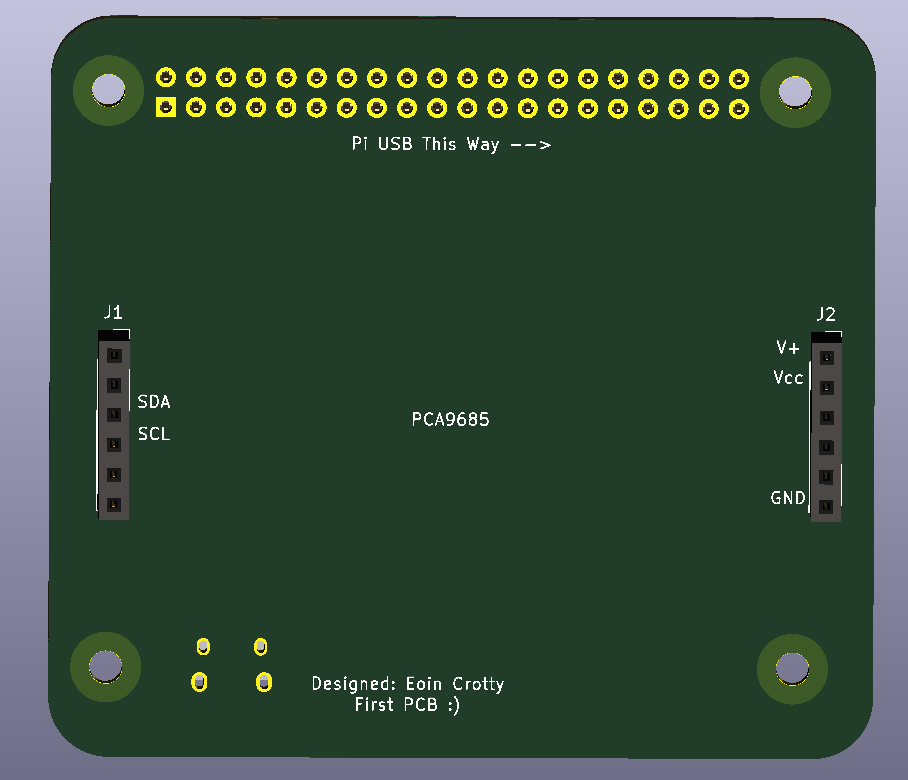
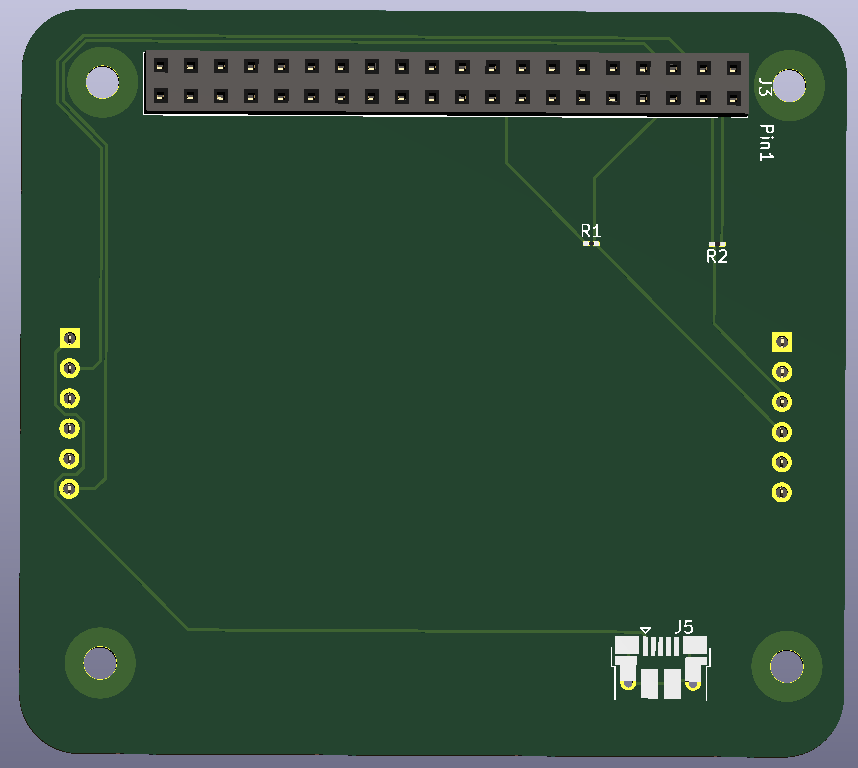
This Project is a work in progess, however the goal is to create a 3D printed robotic arm powerd by a Raspberry Pi capable of basic pick and pluck tasks. The board shown above is a Pi hat to house the PCA9865 used to controll the Servos. It was designed using Kicad. The software is currenlty being written in python using ROS.